You signed in with another tab or window. Reload to refresh your session.You signed out in another tab or window. Reload to refresh your session.You switched accounts on another tab or window. Reload to refresh your session.Dismiss alert
Hi,
I tried to understand kinematics after I found your project here. Some problems stop me to go further. Here I upload some contents of different papers talking about kinematics.
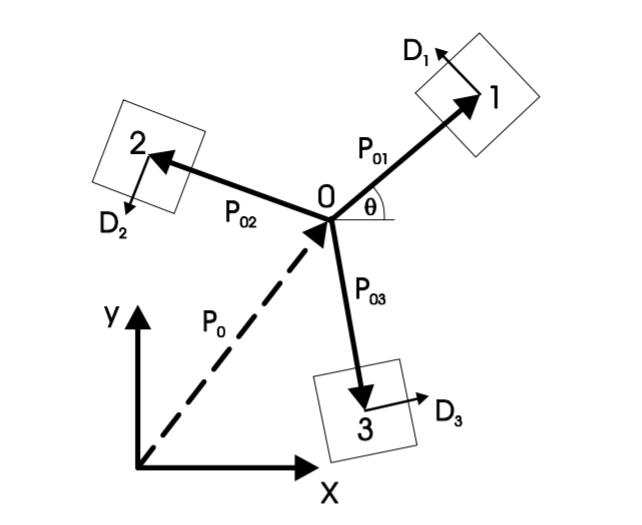
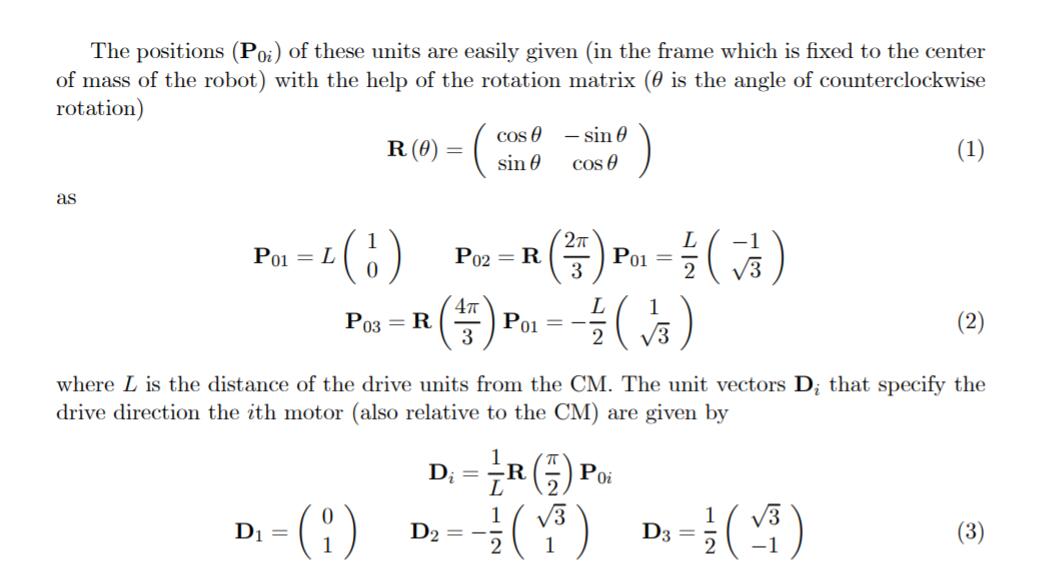
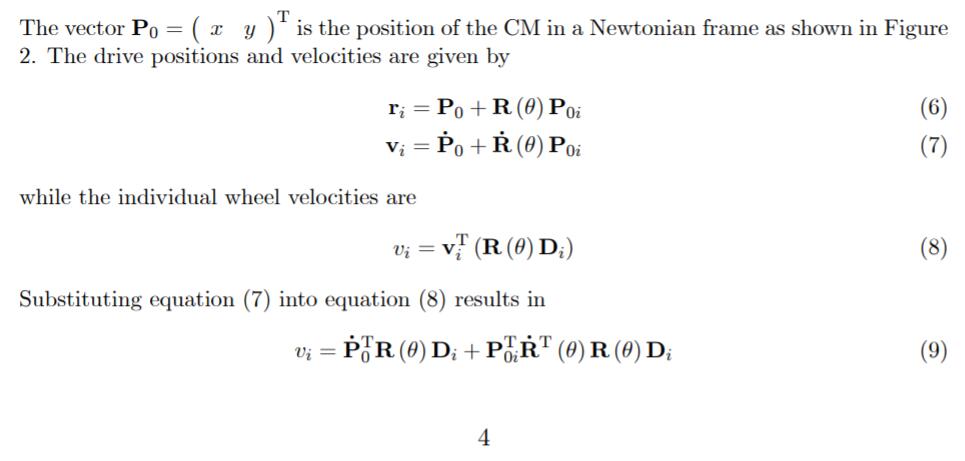
For the 1st three pictures, I don't know how equation (8) is from and I am little confused about translational and tangentianal velocities. I don't know why it mutiplys R(theta) again in equation (8).
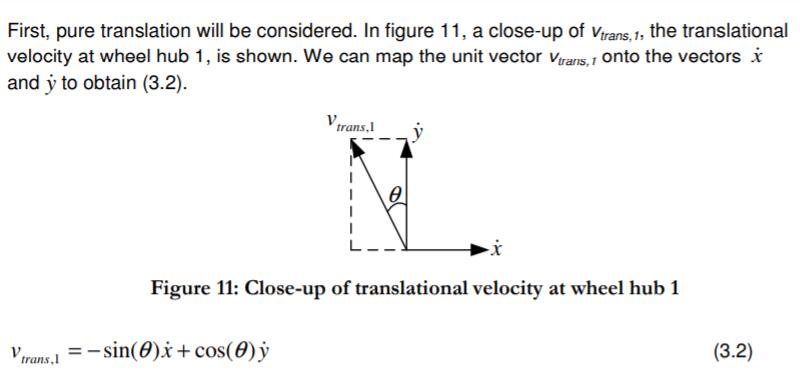
For the 2nd paper, I cannot obtain the equation of v_trans,i. Also, I am not sure if the rotation matrix in this case is R(theta) = [cos(theta) -sin(theta); sin(theta) cos(theta)]. Can you please tell some details about the kinematics.
Hi,
I tried to understand kinematics after I found your project here. Some problems stop me to go further. Here I upload some contents of different papers talking about kinematics.
For the 1st three pictures, I don't know how equation (8) is from and I am little confused about translational and tangentianal velocities. I don't know why it mutiplys R(theta) again in equation (8).
For the 2nd paper, I cannot obtain the equation of v_trans,i. Also, I am not sure if the rotation matrix in this case is R(theta) = [cos(theta) -sin(theta); sin(theta) cos(theta)]. Can you please tell some details about the kinematics.